
My name is Jun and I recently finished my BSc in Electrical Engineering. I joined project Stratos doing Electronics full-time this academic year and in these blogs, I will be writing about my activities in the Electronics department.
This is me in front of the EEMCS Faculty.
During my third year I took the Spaceflight minor; this minor really sparked my interest for the area of space technology. When deciding which MSc I would be following, I went by an interest drink of DARE and I recognized many opportunities to enhance electronics system design skills: my choice was quickly made!
Of course, when thinking about rockets, it might not be immediately apparent that there is much electronics involved, especially compared to other dreamteams. When going through design documentation and existing systems, I discovered the contrary! Inside the rocket, an abundance of electronics systems, sensors and actuators is present, but outside the rocket there’s also a full-fledged communication system to make a rocket launch possible in a safe and streamlined way.
For example, at the heart of Stratos III’s electronics there is the flight computer: a stack of seven printed circuit boards (PCBs) that we design ourselves. It houses a data control board, telemetry board, recovery board etc.: each board has its distinct function. We are currently pushing to finish remaining flight computer board designs so that we can solder, program and test them. A soldered first version of the main control unit is shown in the figure below as well as a render of how the PCBs can be assembled in the end!
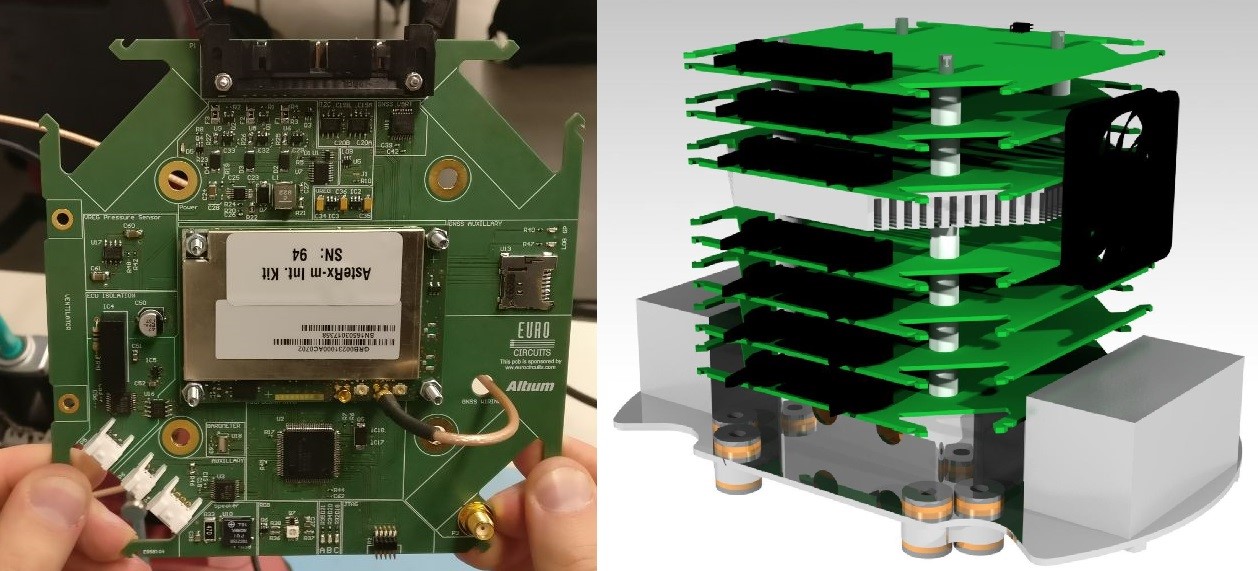
The Flight Computer.
To give some more insight as to why we have even more electrical systems: Stratos III is designed to be partially recovered and from high altitudes (current record is ~30 km!), without causing harm of course, as we are aiming for space in the long term. Also, we want to be able to gather and stream data video during flight to learn and improve for the next project. This can be orientation data but also live streaming from on-board cameras.
Recovery means that the top-part of the rocket (nosecone) must separate at the correct altitude and that parachutes must deploy at the right altitude to return (recover) safely. To not cause harm, the rocket features our “flight termination system”, that in a nutshell can control the rocket engine and deployment with a very powerful communication system.
There’s much more to write about to introduce Stratos’ electronic systems, but I’ll do that in a future post. In the next post I will write about an electrical-mechanical interface I’m working on. Be sure to follow Delft Aerospace Rocket Engineering on Facebook!